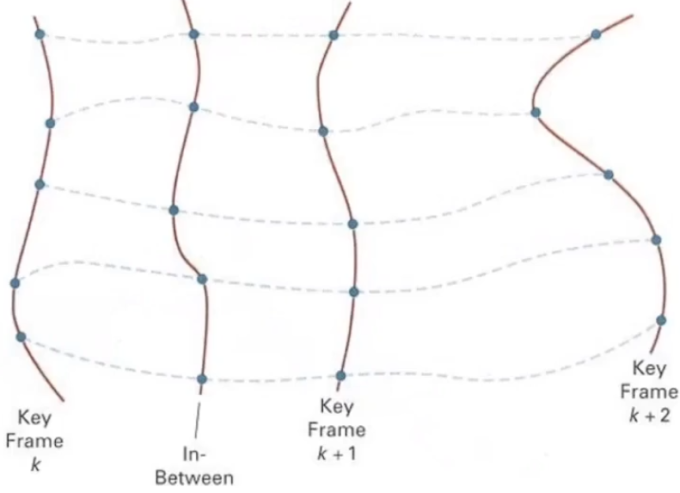
Keyframe Animation

Animator creates keyframes.
Assistant creates in-between frames
Keyframes Interpolation: Think of each frame as a vector of parameter values
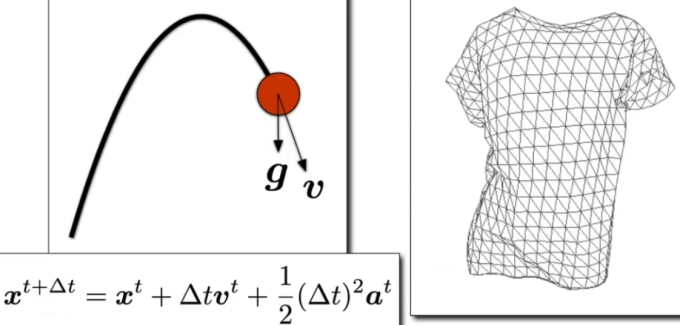
Physical Simulation
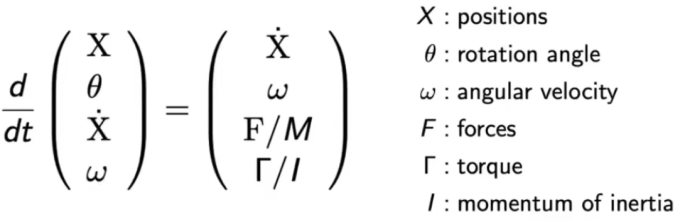
Newton's Law:
Generate motion of objects using numerical simulation
Mass Spring System
Example of Modeling a Dynamic System
A Simple Spring
Idealized Spring:
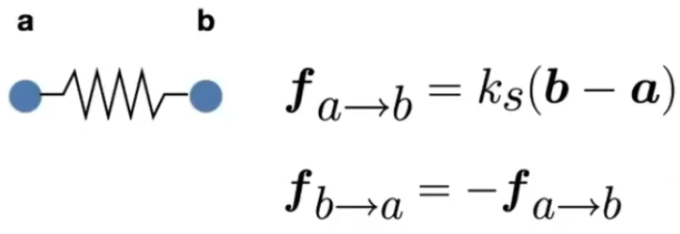
Force pulls points together.
Strength proportional to displacement (Hooke's Law)
Non-Zero Length Spring: Spring with non-zero rest length
is rest length Problem: oscillates forever
If
is a vector for the position of a point of interest, we will use dot notation for velocity and acceleration: ,
Introducing Energy Loss: Simple motion damping
- Behaves like viscous drag on motion
- Slows down motion in the direction of velocity
is a damping coefficient
Problem: slows down all motion
Internal Damping for Spring: Damp only the internal, spring-driven motion
: Damping force applied on b
: Relative velocity projected to the direction from a to b (scalar)
: Relative velocity of b, assuming a is static (vector)
: Direction from a to b
Viscous drag only on change in spring length
Won't slow group motion for the spring system (e.g. global translation or rotation of the group)
Note: This is only one specific type of damping
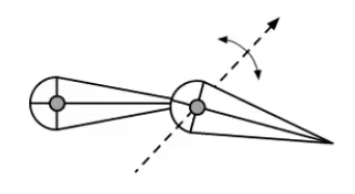
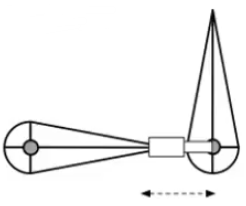
Structures from Springs
Behavior is determined by structure linkages

Particle Systems
Model dynamical systems as collections of large numbers of particles
Each particle's motion is defined by a set of physical (or non-physical) forces
Popular technique in graphics and games
- Easy to understand, implement
- Scalable: fewer particles for speed, more for higher complexity
Challenges
- May need many particles (e.g. fluids)
- May need acceleration structures (e.g. to find nearest particles for interactions)
Animation: For each frame in animation
- [If needed] Create new particles
- Calculate forces on each particle
- Update each particle's position and velocity
- [If needed] Remove dead particles
- Render particles
Forces
Attraction and repulsion forces
- Gravity, electromagnetism, ...
- Springs, propulsion, ...
Damping forces
- Friction, air drag, viscosity, ...
Collisions
- Walls, containers, fixed objects, ...
- Dynamic objects, character body parts, ...
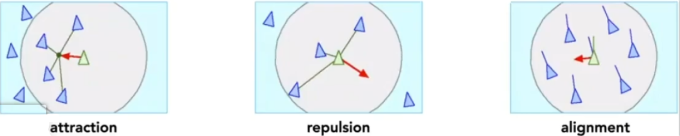
Simulated Flocking as an ODE
Model each bird as a particle. Subject to very simple forces:
- attraction to center of neighbors
- repulsion from individual neighbors
- alignment toward average trajectory of neighbors
Simulate evolution of large particle system numerically
Emergent complex behavior (also seen in fish, bees, ...)
Kinematics
Forward Kinematics
Articulated skeleton
- Topology (what's connected to what)
- Geometric relations from joints
- Tree structure (in absence of loops)
Joint types
- Pin (1D rotation)
- Ball (2D rotation)
- Prismatic joint (translation)
Strengths:
- Direct control is convenient
- Implementation is straightforward
Weaknesses
- Animation may be inconsistent with physics
- Time consuming for artists
Inverse Kinematics
Animator provides position of end-effector, and computer must determine joint angles that satisfy constraints.
Direct inverse kinematics: for two-segment arm, can solve for parameters analytically.
Problem:
- Multiple solutions in configuration space
- Solutions may not always exist
Numerical solution to general N-link lK problem
- Choose an initial configuration
- Define an error metric (e.g. square of distance between goal and current position)
- Compute gradient of error as function of configuration
- Apply gradient descent (or Newton's method, or other optimization procedure)
Rigging
Rigging is a set of higher level controls on a character that allow more rapid & intuitive modification of pose, deformations, expression, etc.
Important:
- Like strings on a puppet
- Captures all meaningful character changes
- Varies from character to character
Blend Shapes
Instead of skeleton, interpolate directly between surfaces
E.g. , model a collection of facial expressions:
- Simplest scheme: take linear combination of vertex positions
- Spline used to control choice of weights over time
Motion Capture
Data-driven approach to creating animation sequences
- Record real-world performances (e.g. person executing an activity)
- Extract pose as a function of time from the data collected
Strengths
- Can capture large amounts of real data quickly
- Realism can be high
Weaknesses
- Complex and costly set-ups
- Captured animation may not meet artistic needs, requiring alterations
Particle Simulation
Single Particle Simulation
Assume motion of particle determined by a velocity vector field that is a function of position and time:
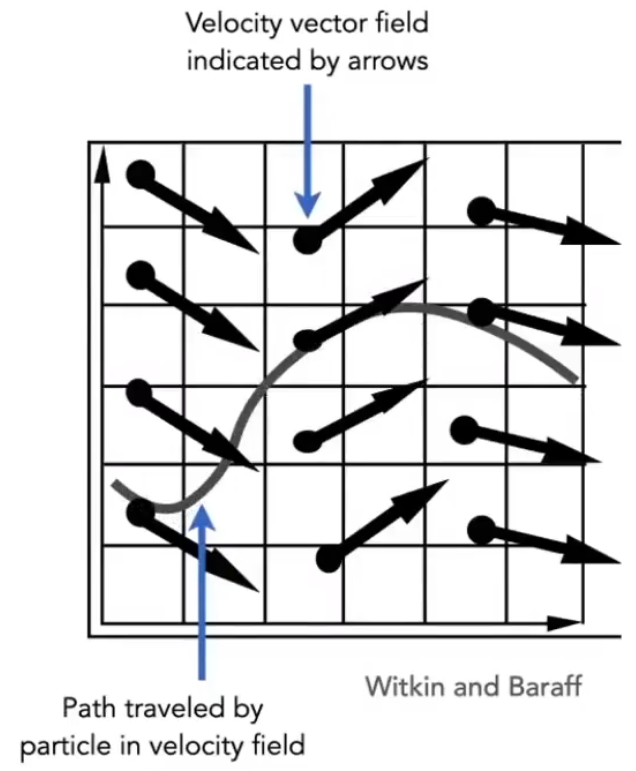
Computing position of particle over time requires solving a first-order ordinary differential equation(ODE):
Euler's Method
Simple iterative method
Commonly used
Very inaccurate
Most often goes unstable
Errors: With numerical integration, errors accumulate. Euler integration is particularly bad.
Instability: Inaccuracies increase as time step
increases. Instability is a common, serious problem that can cause simulation to diverge.
Combat Instability
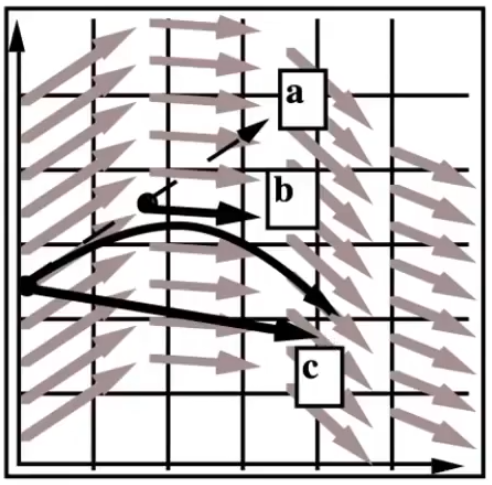
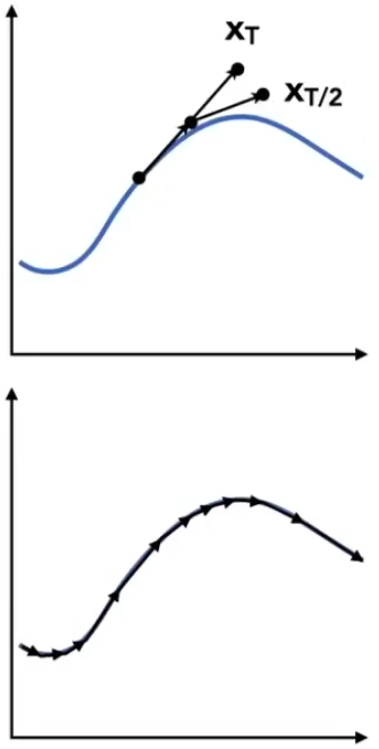
Midpoint method / Modified Euler: Average velocities at start and endpoint
Midpoint method:
- Compute Euler step (a)
- Compute derivative at midpoint of Euler step (b)
- Update position using midpoint derivative (c)
Modified Euler: Average velocity at start and end of step
Adaptive step size: Compare one step and two half-steps, recursively, until error is acceptable
- Technique for choosing step size based on error estimate
- Very practical technique
- But may need very small steps!
Repeat until error is below threshold:
- Compute
an Euler step, size - Compute
two Euler steps, size - Compute error
- If (error > threshold) reduce step size and try again
Implicit methods: Use the velocity at the next time step (hard)
- Informally called backward methods
- Use derivatives in the future, for the current step
- Solve nonlinear problem for
and - Use root-finding algorithm, e.g. Newton's method
- Offers much better stability
Position-based / Verlet integration: Constrain positions and velocities of particles after time step
- After modified Euler forward-step, constrain positions of particles to prevent divergent, unstable behavior
- Use constrained positions to calculate velocity
- Both of these ideas will dissipate energy, stabilize
Pros / cons:
- Fast and simple
- Not physically based, dissipates energy (error)
Rigid Body Simulation
Simple case:
- Similar to simulating a particle
- Just consider a bit more properties
Fluid Simulation
- Assuming water is composed of small rigid-body spheres
- Assuming the water cannot be compressed (i.e. const. density)
- So, as long as the density changes somewhere, it should be "corrected" via changing the positions of particles
- You need to know the gradient of the density anywhere w.r.t. each particle's position
Large Collections
Two different views to simulating large collections of matters:
Lagrangian Approach (质点法):
Photographer follows the same bird through out its course.
Eulerian Approach (网格法):
The photographer is stationary and can take picture of all the birds passing through one frame only (say at time 't').
Material Point Method (MPM): Hybrid, combining Eulerian and Lagrangian views
- Lagrangian: consider particles carrying material properties
- Eulerian: use a grid to do numerical integration
- Interaction: particles transfer properties to the grid, grid performs update, then interpo-late back to particles