Triangles - Fundamental Shape Primitives:
- Most basic polygon. Break up other polygons
- Unique properties. Guaranteed to be planar. Well-defined interior. Well-define method for interpolating values at vertices over triangle (barycentric interpolation)
What Pixel Values Approximate a Triangle:
- Input: position of triangle vertices projected on screen.
- Output: set of pixel values approximating triangle
Sampling
Evaluating a function at a point is sampling. We can discretize a function by sampling.
for (int x = 0; x < xmax; ++x)
output[x] = f(x);
Sampling is a core idea in graphics. We sample time (1D), area (2D), direction (2D), volume (3D) ...
Rasterization As 2D Sampling
Sample if each pixel center is inside triangle. Define binary function: inside (tri, x, y), x,y not necessarily integers
Rasterization = Sampling a 2D indicator function
for (int x = 0; x < xmax; ++x) for (int y = 0; y < ymax; ++y) image[x][y] = inside(tri, x+0.5, y+0.5); // Improve: Use a Bounding Box. /*e.g. xmin = Minimum value of three point abscissa xmax = Maximum value of three point abscissa ymin = Minimum value of three point ordinates ymax = Maximum value of three point ordinates */ for (int x = xmin; x < xmax; ++x) for (int y = ymin; y < ymax; ++y) image[x][y] = inside(tri, x+0.5, y+0.5);Evaluating inside (tri, x, y): Three Cross Products
Edge cases (literally)
Sampling Artifacts (Errors/Mistakes/Inaccuracies) in Computer Graphics: Artifacts due to sampling - "Aliasing"
- Jaggies (Staircase Pattern)
- Moire Patterns in Imaging: Skip odd rows and columns
- Wagon Wheel Illusion (False Motion)
Behind the Aliasing Artifacts: Signals are changing too fast (high frequency), but sampled too slowly
Antialiasing Idea: Blurring (Pre-Filtering) Before Sampling
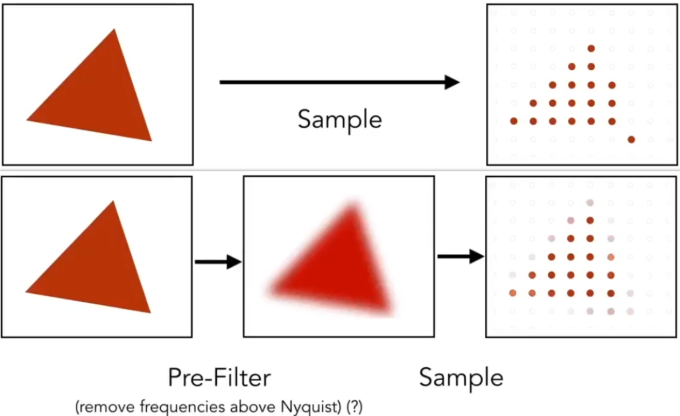
Note antialiased edges in rasterized triangle where pixel values take intermediate values.
Antialiasing
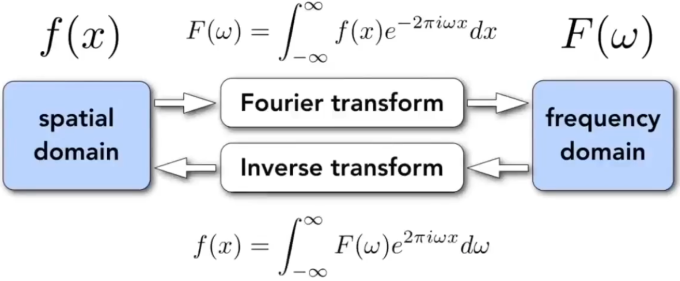
Fourier Transform: Represent a function as a weighted sum of sines and cosines.
Fourier Transform Decomposes A Signal Into Frequencies
Undersampling Creates Frequency Aliases: High-frequency signal is insufficiently sampled, samples erroneously appear to be from a low-frequency signal. Two frequencies that are indistinguishable at a given sampling rate are called "aliases".
Filtering = Getting rid of certain frequency contents = Convolution (= Averaging)
Convolution Theorem: Convolution in the spatial domain is equal to multiplication in the frequency domain, and vice versa
Option 1: Filter by convolution in the spatial domain
Option 2:
- Transform to frequency domain (Fourier transform)
- Multiply by Fourier transform of convolution kernel
- Transform back to spatial domain (inverse Fourier)
Box Filter: Averaging matrix. e.g. 3*3 box filter
Sampling = Repeating Frequency Contents
Aliasing = Mixed Frequency Contents
Reduce Aliasing error:
Increase sampling rate:
- Essentially increasing the distance between replicas in the Fourier domain
- Higher resolution displays, sensors, framebuffers...
- But: costly & may need very high resolution
Antialiasing:
- Making Fourier contents "narrower" before repeating
- i.e. Filtering out high frequencies before sampling
A Practical Pre-Filter: A 1 pixel-width box filter (low pass, blurring). Antialiasing by averaging values in pixel area:
Convolve f(x,y) by a 1-pixel box-blur
convolving = filtering = averaging
Antialiasing by computing average pixel value: In rasterizing one triangle, the average value inside a pixel area of f(x,y) = inside(triangle,x,y) is equal to the area of the pixel covered by the triangle.
Then sample at every pixel's center
Antialiasing by supersampling (MSAA): Approximate the effect of the 1-pixel box filter by sampling multiple locations within a pixel and averaging their values:

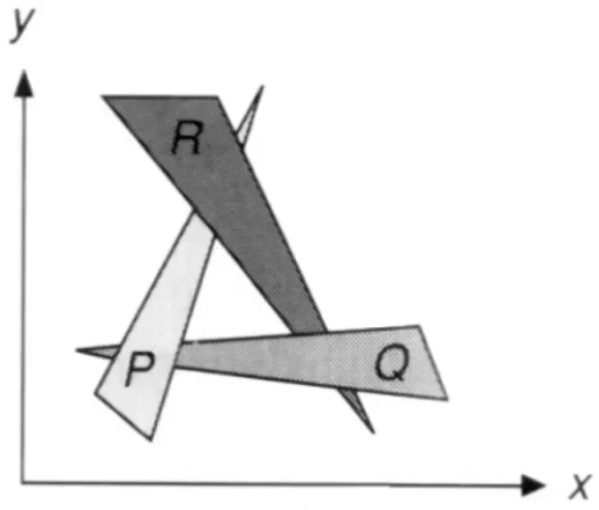
Visibility / Occlusion
Painter's Algorithm
Inspired by how painters paint. Paint from back to front, overwrite in the framebuffer.
Requires sorting in depth (
Z-Buffer
This is the algorithm that eventually won. Idea:
Store current min. z-value for each sample (pixel)
Needs an additional buffer for depth values
- frame buffer stores color values
- depth buffer (z-buffer) stores depth
For simplicity we suppose z is always positive. (smaller z->closer, larger z->further)
Algorithm:
Initialize depth buffer to
During rasterization:
for (each triangle T) for (each sample (x,y,z) in T) if (z < zbuffer[x,y]){ // closest sample so far framebuffer[x,y]=rgb; // update color zbuffer[x,y]=z; // update depth }else{ ; // do nothing, this sample is occluded }
Complexity: O(n) for n triangles (assuming constant coverage)
Z-Buffer is the most important visibility algorithm, and implemented in hardware for all GPUs.